A proportional integral derivative (PID) controller is an instrument used in industrial control applications to regulate temperature, flow, pressure, speed and other process variables. PID Controllers are a practical example of control systems engineering and one of the most common controllers used.
Each part of PID offers unique advantages that make this so advantageous:
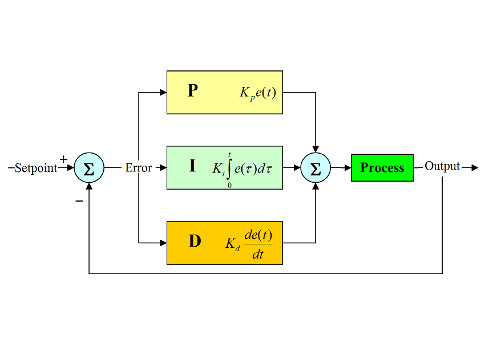
A. Proportional Control: Proportional control produces a control action that is proportional to the error. When the correcting signal is bigger, the bigger the error in the system. As error is reduced the amount of correction from proportional control is likewise also reduced.
B. Integral Control: Integral control produces a control action that is proportional to the integral of the error with time. A constant error signal produces an increasing correcting signal and continues as long as the error persists.
C. Derivative Control: Derivative control produces a control action that is proportional to the rate at which the error is changing. With a sudden change, the controller gives a large correcting signal; with a gradual change, only a small correcting signal is produced. This type of control is regarded as a form of anticipatory control and is often used in conjunction with proportional and integral control.
Here’s a super cool practical example of using a PID controller for a self-balancing phone drone selfie.